|
INTRO The
chassis of a robot is the
structural base that gives the robot its shape and size. It includes the drive train that allows the robot to move around. CHASSIS
DESIGN Chassis
design needs to consider the following:
EXAMPLES Below
we will look at a few chassis and discuss a few attributes. We will not look at the drive train until
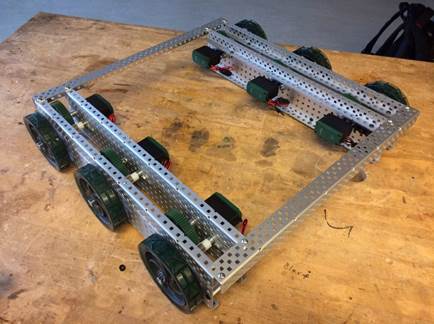
later. EXAMPLE 1
EXAMPLE 2
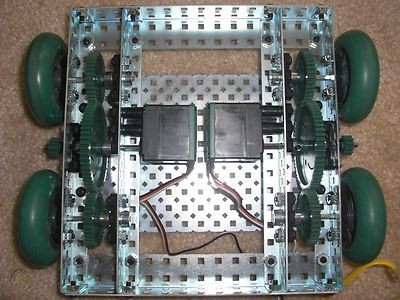
EXAMPLE 3 The
small chassis below offers little mounting space but does allow the robot to
move more easily in tight spots.
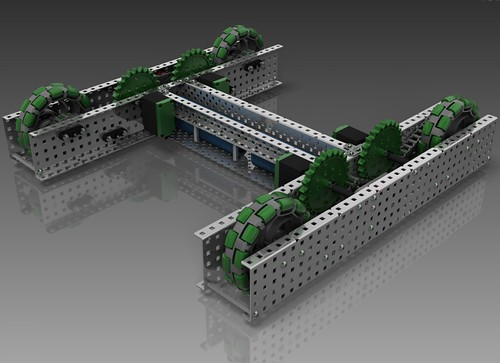
EXAMPLE 4 The
H-shaped chassis below allows floor access at the front and back of the
robot. In exchange, it doesn’t offer
easy mounting options for mechanisms.
This design hides the wheels insides the side
structural members better protecting them from contact. The structure used is wide C-channel making
the chassis more solid but also heavier.
DRIVE
TRAIN DESIGN The
drive train consists of the parts that make the robot move. This includes the motors, any gears, sprockets
and chains as well as the wheels. Drive
train design needs to consider:
CHASSIS
& DRIVE TRAIN INTERCHANGEABLE TERMS We
have separated chassis design and drive train design in order to simplify our
discussion. In reality, both have to
be done at the same time. So much so
that we often use “drive train” and “chassis” interchangeably to refer to both
the structure and the moving mechanisms. |